文章目录

前言
!Note
术语表未编入索引。词汇表按字母顺序排列,因此只需向下滚动即可找到感兴趣的主题。
1 2.4Ghz
2.4Ghz:数字(扩频)无线电通信在我们的应用中使用的频率,包括 2.4Ghz 遥控、蓝牙和一些视频传输设备。该频段与模拟遥控通信使用的老式 72Mhz 频段不同。为避免无线电频率冲突,在使用 2.4Ghz 机载视频发射器时,最好使用 72Mhz 无线电设备;在使用 2.4Ghz 遥控设备时,最好使用 900Mhz 视频设备。
2 AGL
AGL:距离地面的高度。
3 AHRS
AHRS:姿态航向参考系统。一个 IMU(见下文)加上用于解释传感器输出的代码,以确定飞机的 XYZ 和航向。
4 APM
APM:ArduPilotMega。
5 AMA
AMA:航空模型学院。美国主要的航模协会。美国航模协会与美国联邦航空管理局(FAA)密切合作,为业余无人机的使用制定合理的规则(reasonable rules)。每个美国航模协会分会和场地的政策可能略有不同,但在不违反协会(或 FAA/NAS)规定的情况下,可以在美国航模协会的场地上飞行和测试机架及某些技术。
6 Arduino
Arduino:一个开源嵌入式处理器项目。包括目前基于 Atmel Atmega168 微处理器的硬件标准和必要的支持硬件,以及基于类 C 语言 Processing 的软件编程环境。官方网站在这里(here)。
7 APM (AutoPilot Mega)
APM (AutoPilot Mega):自动驾驶仪提供稳定飞行、位置保持和自动任务(航点)路径跟踪功能。
8 ATC
ATC:这可能是 Copter 中参数以"ATC_"开头的高度控制库,也可能指空中交通管制。通常位于机场控制塔,但也可以是 AirMap 或 Altitude Angel 等应用程序或服务。
9 Copter
Copter:ArduPilot 项目的旋转翼自动驾驶仪软件变体。
10 Plane
Plane:ArduPilot 项目的固定翼自动驾驶软件变体。
11 Rover
Rover:ArduPilot 项目的地面和水上自动驾驶软件变体。
12 BEC
BEC:电池消除电路。电压调节器可用于电调(见下文),也可作为独立产品使用。旨在为遥控设备、自动驾驶仪和其他机载电子设备提供恒定的 5V 电压。
13 Bootloader
Bootloader:存储在微处理器非易失性存储器中的特殊软件代码,可与个人电脑连接,下载用户程序。另请参阅"固件"。
14 COA
COA:授权证书。美国联邦航空局对无人机飞行的批准。详情请查看 faa.gov 网站和 DIY 无人机监管常见问题(DIY Drones Regulatory FAQ)。
15 DCM
DCM:方向余弦矩阵。这是一种相当于卡尔曼滤波器的算法,处理量较小。更多信息,请参阅此处(this)。
16 Eagle file
Eagle file:由免费的 Cadsoft Eagle 程序生成的原理图和 PCB 设计文件(以及告诉 PCB 工厂如何制作电路板的相关文件)。这是开源硬件领域最常用的标准,但具有讽刺意味的是,它本身并不是开源软件。不用说,这不是最佳选择,而且 Eagle 软件既笨拙又难学。我们希望有一天会出现一种开放源代码的替代品。
17 ESC
ESC:电子速度控制器。控制电动飞机马达的装置。作为主电池和遥控接收器之间的连接。通常包括一个 BEC 或电池消除电路,为遥控系统和其他机载电子设备(如自动驾驶仪)提供电源。
18 Firmware
Firmware:加载到基于微处理器的产品的非易失性存储器中的软件或草图。之所以称其为"固件",是因为即使断电,它也会保留在非易失性存储器中,因此是"非"易失性的。就自动驾驶仪而言,"程序"或应用程序(智能手机用户的应用程序)决定了自动驾驶仪的工作内容和方式。
19 FPV
FPV:第一人称视角。这是一种利用机载摄像机和与地面无线连接的技术,可让地面上的飞行员通过视频护目镜看到驾驶舱内的飞行情况。
20 FTDI
FTDI:将 USB 转换为串行通信的标准。可作为芯片用于有 USB 接口的电路板,或作为适配器(adapter)连接到辫子引脚。FTDI 是 Future Technology Devices International(未来技术器件国际公司)的缩写,也是生产芯片的公司名称。
相关文章
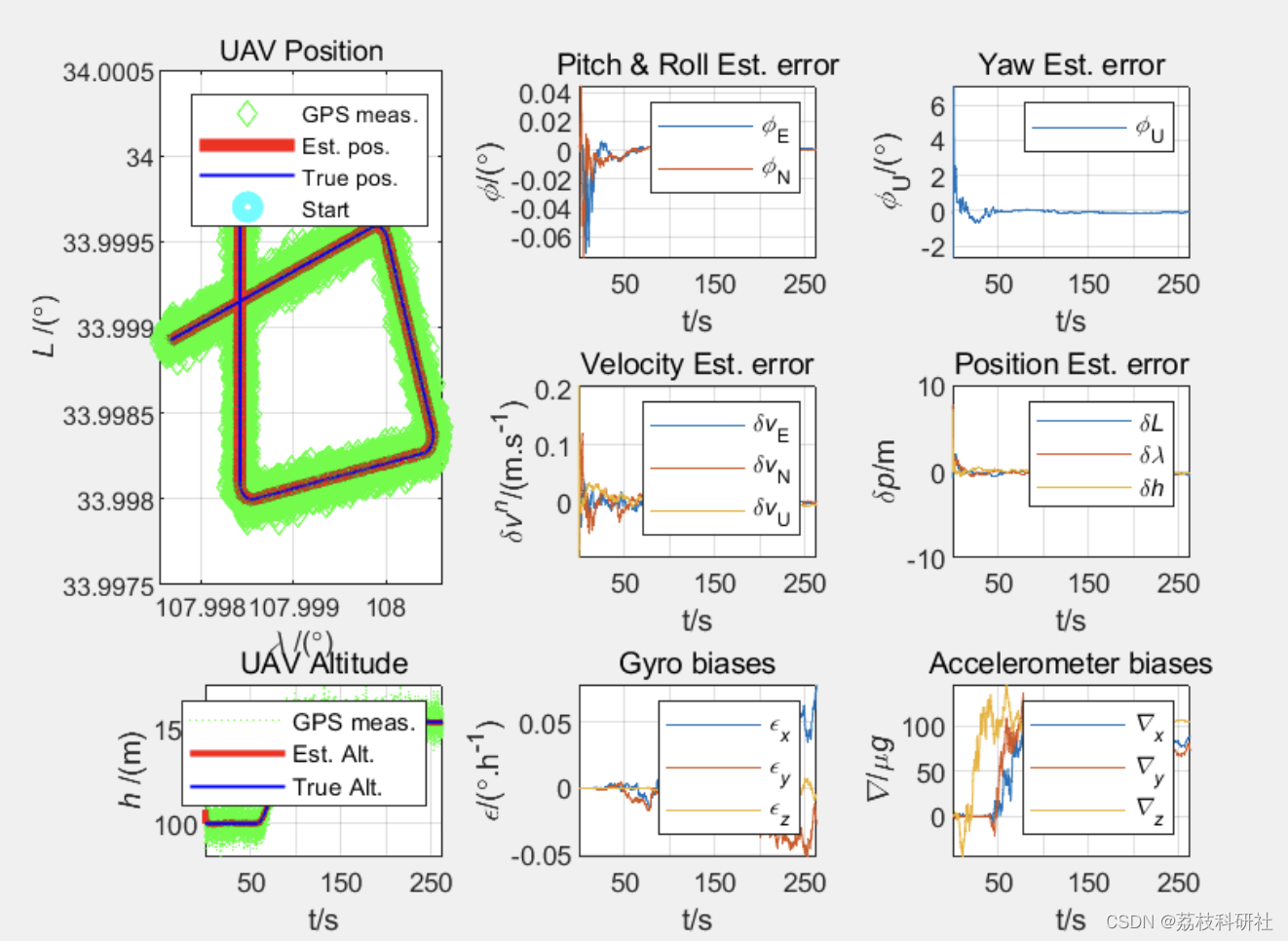
多旋翼无人机组合导航系统-多源信息融合算法(Matlab代码实现)
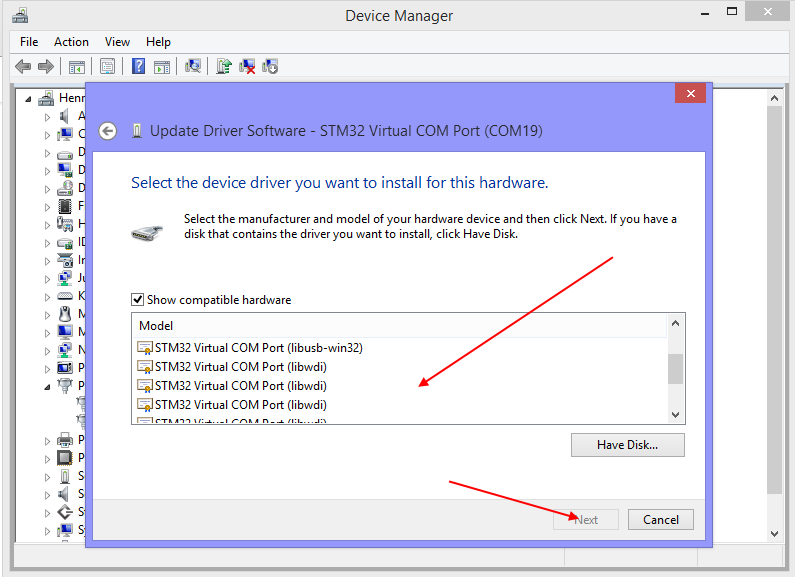






(10)(10.6) 开发人员工具(下载)


Ardupilot — EKF3使用TOF作为高度源代码梳理


Ardupilot — AP_OpticalFlow代码梳理


Ardupilot — EKF3使用光流室内定位代码梳理

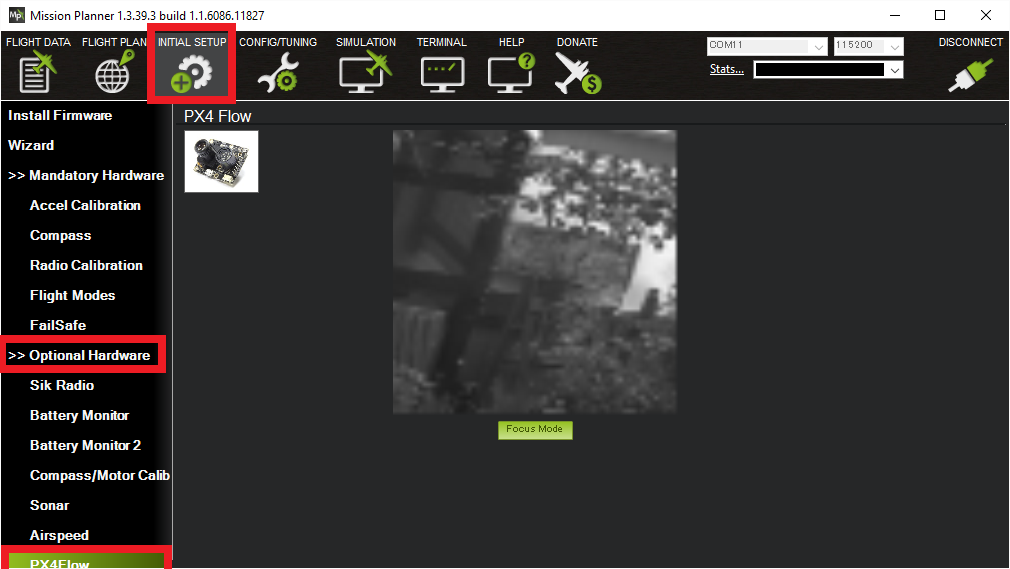
(25)(25.1) 光学流量传感器的测试和设置