文章目录

前言
固件服务器(firmware server)可提供所有飞行器的最新固件。其中包括:
本页提供了一些被视为"重要"的特定构建的额外链接--例如,适合 APM2.x 板的 Copter 的最后构建。
!Tip
固件服务器还托管 GCS 安装程序和其他工具:
- Mission Planner
- APM Planner 2.0
- RadioSiK
- Developer Builds
- Build and Development Tools
- Companion Computers and associated example code
- AP Peripherals
!Note
ArduPilot 还提供定制固件构建服务器(Custom Firmware Build Server),允许创建仅包含所需功能的定制固件构建。这对 1MB 自动驾驶仪非常有用,因为这些自动驾驶仪的标准固件构建在某些功能上受到限制,以便将代码放入可用的闪存空间。
10.8.1 固件
以下固件之所以"特殊",是因为它代表了某些重要的里程碑,例如"特定自动驾驶仪的最后一个构建版本"。
1. ArduCopter APM 2.x Firmware
适用于 APM 2.x 的 ArduCopter v3.2.1 固件。这是最后一个仍适用于 APM 2.x 板的 ArduCopter 版本。
2. ArduCopter APM 1.0 Firmware
适用于 APM 1.0 的 ArduCopter v3.2.1 固件。这是仍适用于 APM 1.0 板的最后一个 ArduCopter 版本。
10.8.2 Bootloader
ArduPilot 集团为各种电子设备创建的引导加载程序。
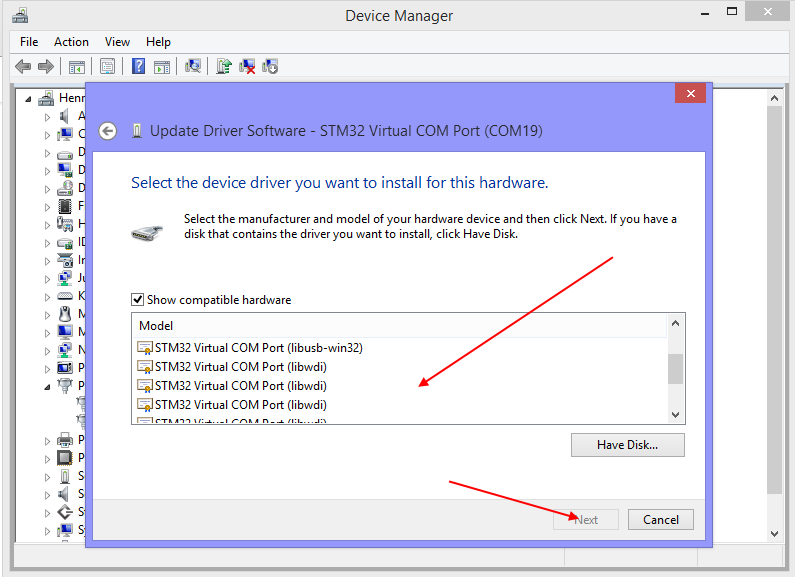
10.8.3 APM2.x Autopilot
用于 APM2.x 自动驾驶仪系列的引导加载程序。
你需要带有 ISP 连接器的 AVR 编程器来刻录这些引导加载程序。
10.8.4 许可证
本程序是自由软件:你可以根据自由软件基金会发布的 GNU 通用公共许可证条款,许可证第3版或任何后续版本 (由你选择),重新发布和/或修改本程序。
发布本程序是希望其有用,但不附带任何保证;甚至不附带适销性或特定用途适用性的默示保证。更多详情,请参阅 GNU General Public License。
10.8.5 安全
操作任何类型的飞行器都会带来很多乐趣。然而,没有什么比发生事故或触犯法律更快毁掉你在公园的一天了。我们希望你能有一个美好的体验,因此请你务必做到以下几点:
- 按照当地所有法律法规操作。例如,在美国,现行法规要求你在距离地面 400 英尺以下、在视线范围内操作大多数无人机,并远离障碍物和居民区。由于这些法规因地而异,即使在同一个国家也不尽相同,因此请确保你了解自己需要做什么才能保持合规;
- 切勿以可能对自己、他人或财产造成危险的方式操作飞行器或软件。螺旋桨在旋转时很容易割伤你;如果无人飞行器落在人或物体上,可能会造成伤害;无人飞行器卷入电线可能会导致停电。正如本-富兰克林所说,"一盎司的预防胜过一磅的治疗";
- 请始终牢记,软件和硬件故障时有发生。虽然我们在设计产品时已尽量减少此类问题,但你在操作时应始终认识到,故障可能会在任何时候发生,而且毫无征兆。因此,你应采取适当的预防措施,将发生故障时的危险降至最低;
- 切勿将软件或硬件用于有人驾驶飞行器。我们提供的软件和硬件只能用于无人驾驶飞行器。
相关文章
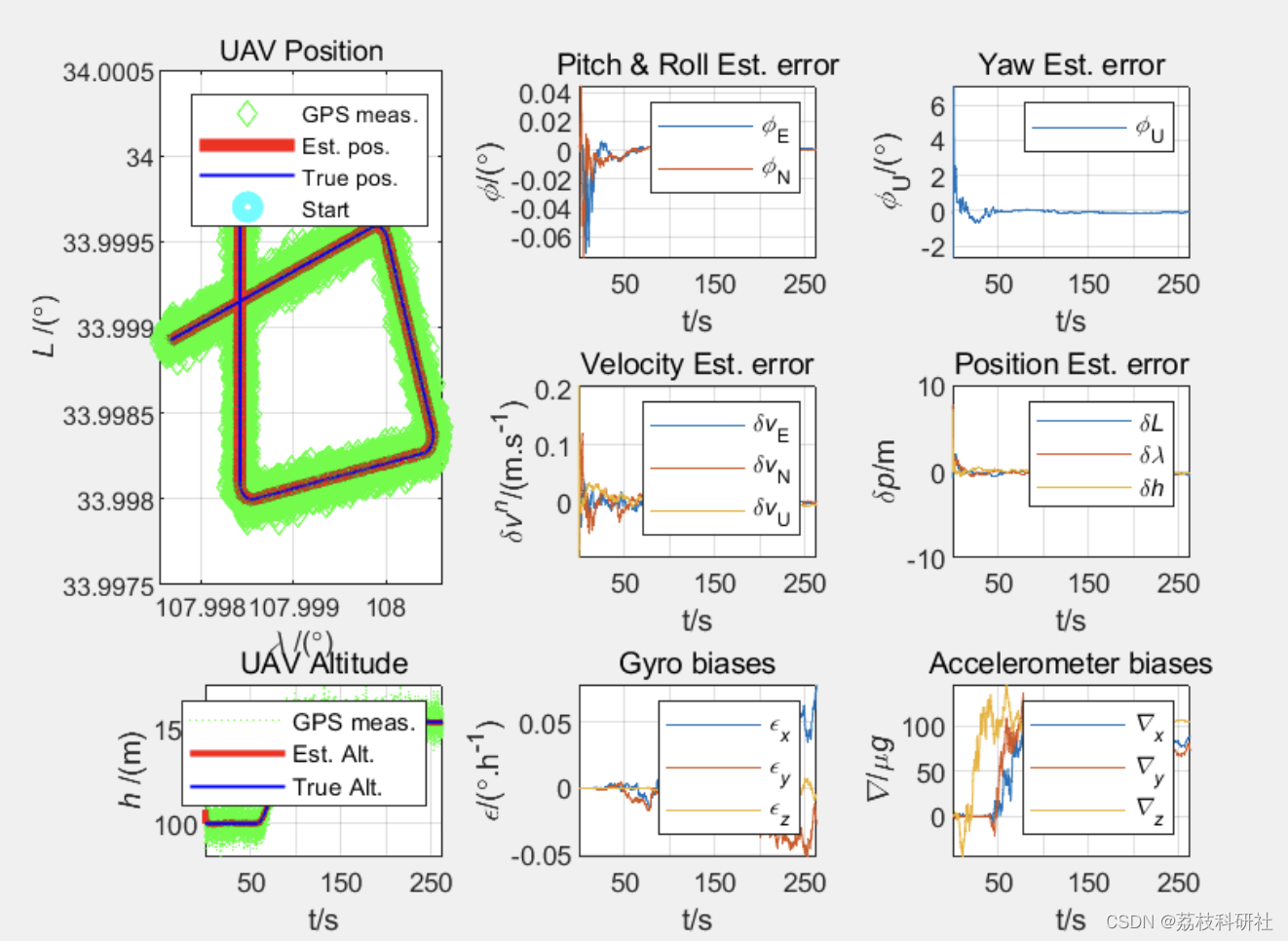
多旋翼无人机组合导航系统-多源信息融合算法(Matlab代码实现)

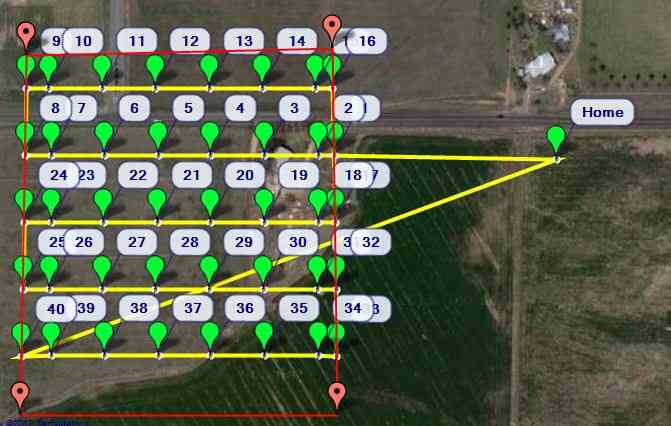





(10)(10.6) 开发人员工具(下载)

Ardupilot — EKF3使用TOF作为高度源代码梳理


Ardupilot — AP_OpticalFlow代码梳理


Ardupilot — EKF3使用光流室内定位代码梳理

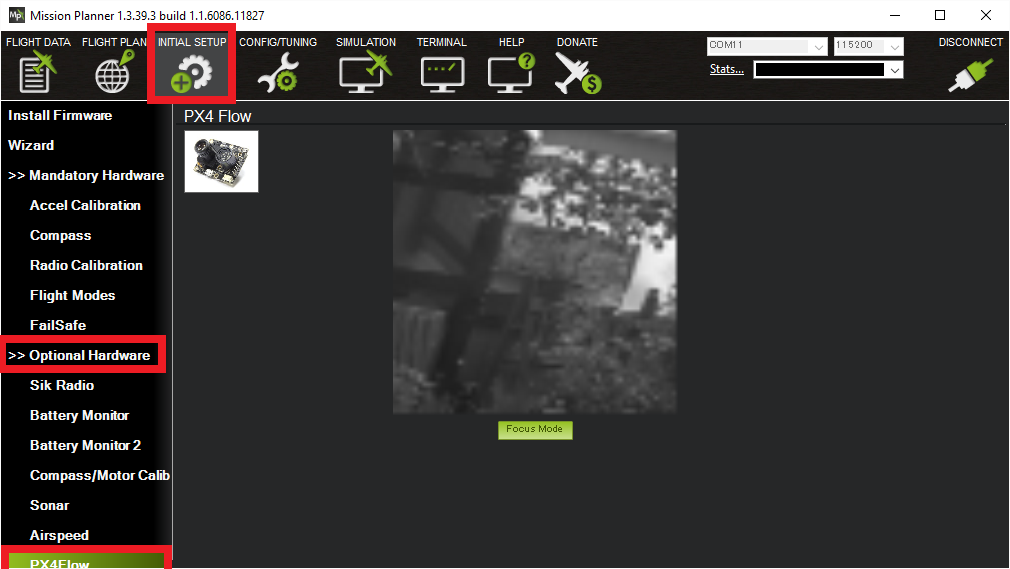
(25)(25.1) 光学流量传感器的测试和设置