💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
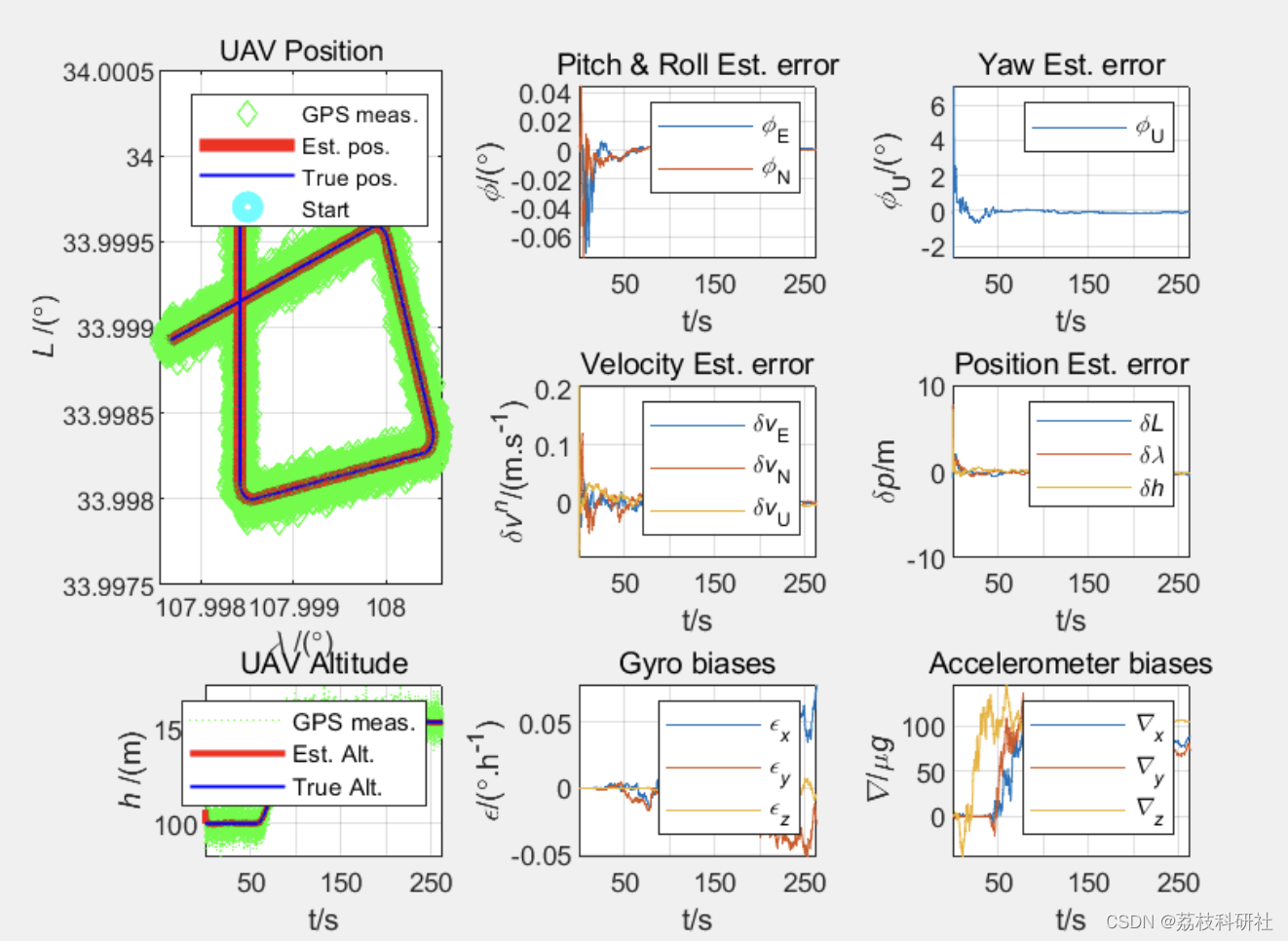
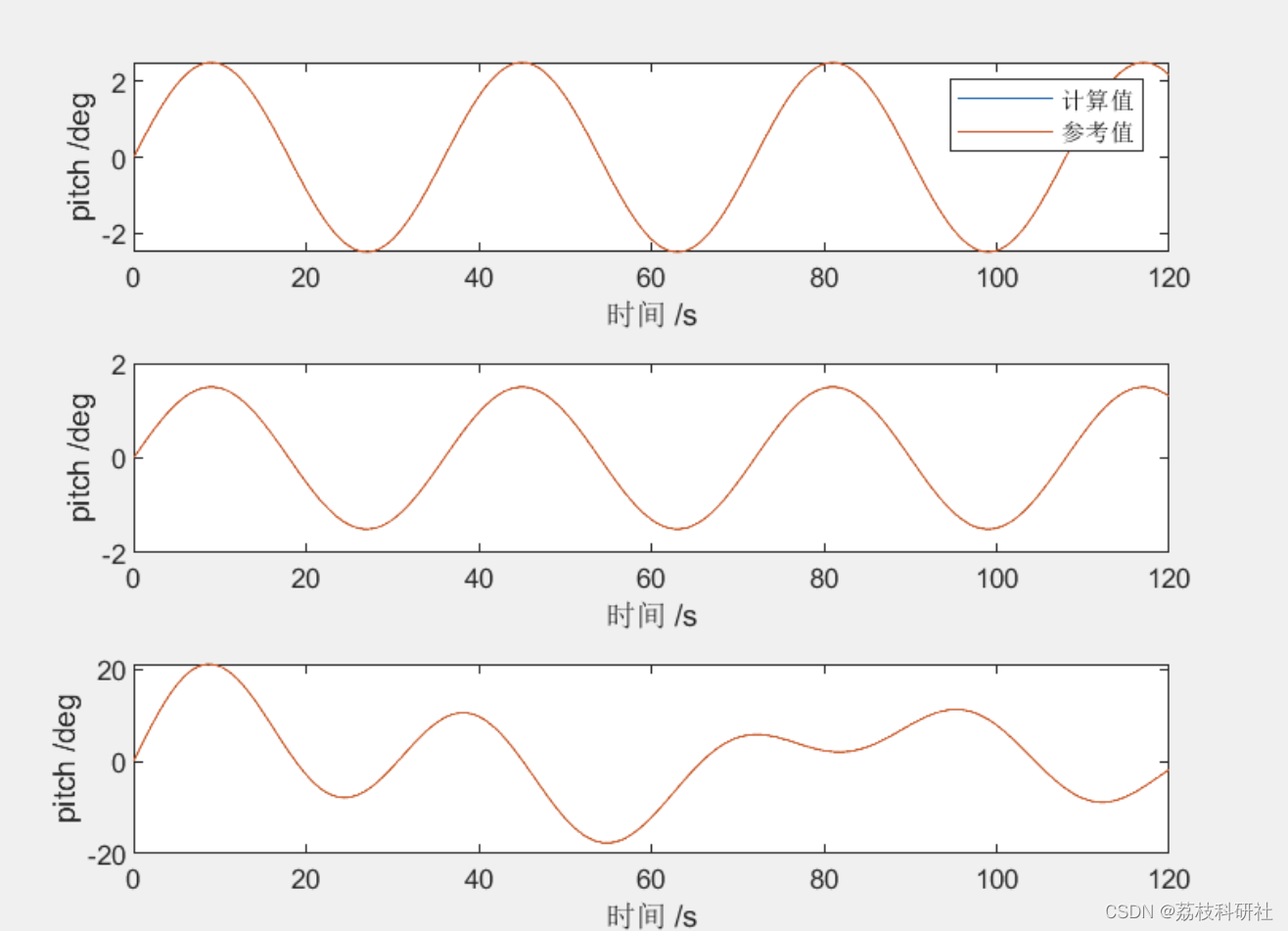
多旋翼无人机已被广泛应用于军事与民用领域。导航系统是多旋翼无人机的重要组成部分,是其实现安全与稳定飞行的基础。采用INS/GPS组合导航系统可实现高精度导航,该组合导航系统具有优势互补、导航机构冗余的特点,其实质是一个多传感器导航信息优化处理系统。无人机的主要导航参数就是依靠多传感器信息融合获得的,因此信息融合技术是组合导航系统的关键技术,目前已成为国内外学者研究的热点问题。随着多旋翼无人机向自主化和智能化发展,多旋翼无人机对其自身导航系统的性能提出了更高的要求。但是受多旋翼无人机自身成本的制约,导航系统中选用的传感器精度较低。针对这一矛盾,本文提出将无人机自带的微型惯导系统与GPS通过信息融合技术相结合,构成INS/GPS组合导航系统,由此能够提升导航系统的整体性能。本文的研究工作围绕组合导航系统的设计展开。除此之外,本文以课题组自行研制的全新结构多旋翼小型无人机为研究平台,展开对机载多传感器组合导航系统信息融合这一关键技术的研究。
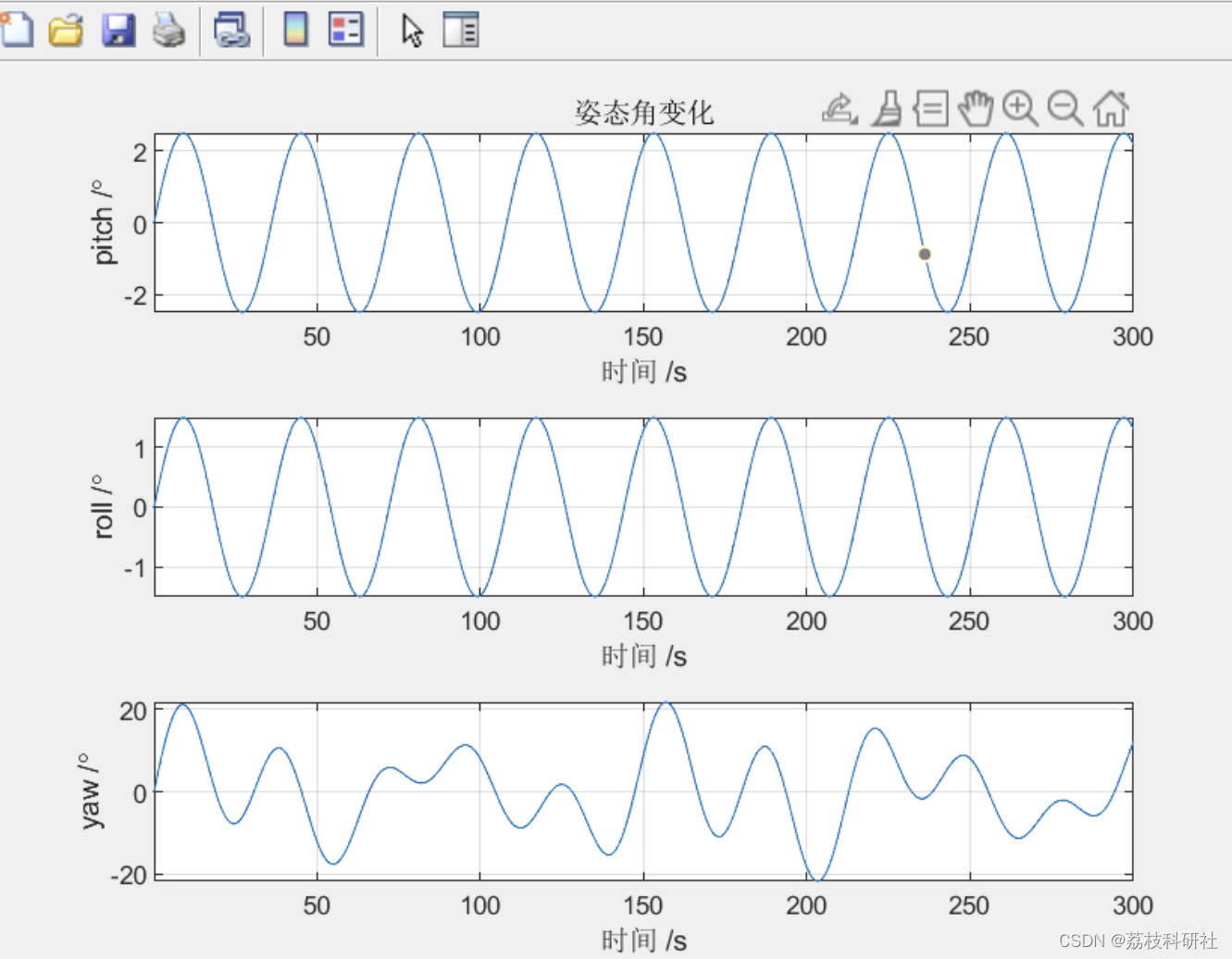
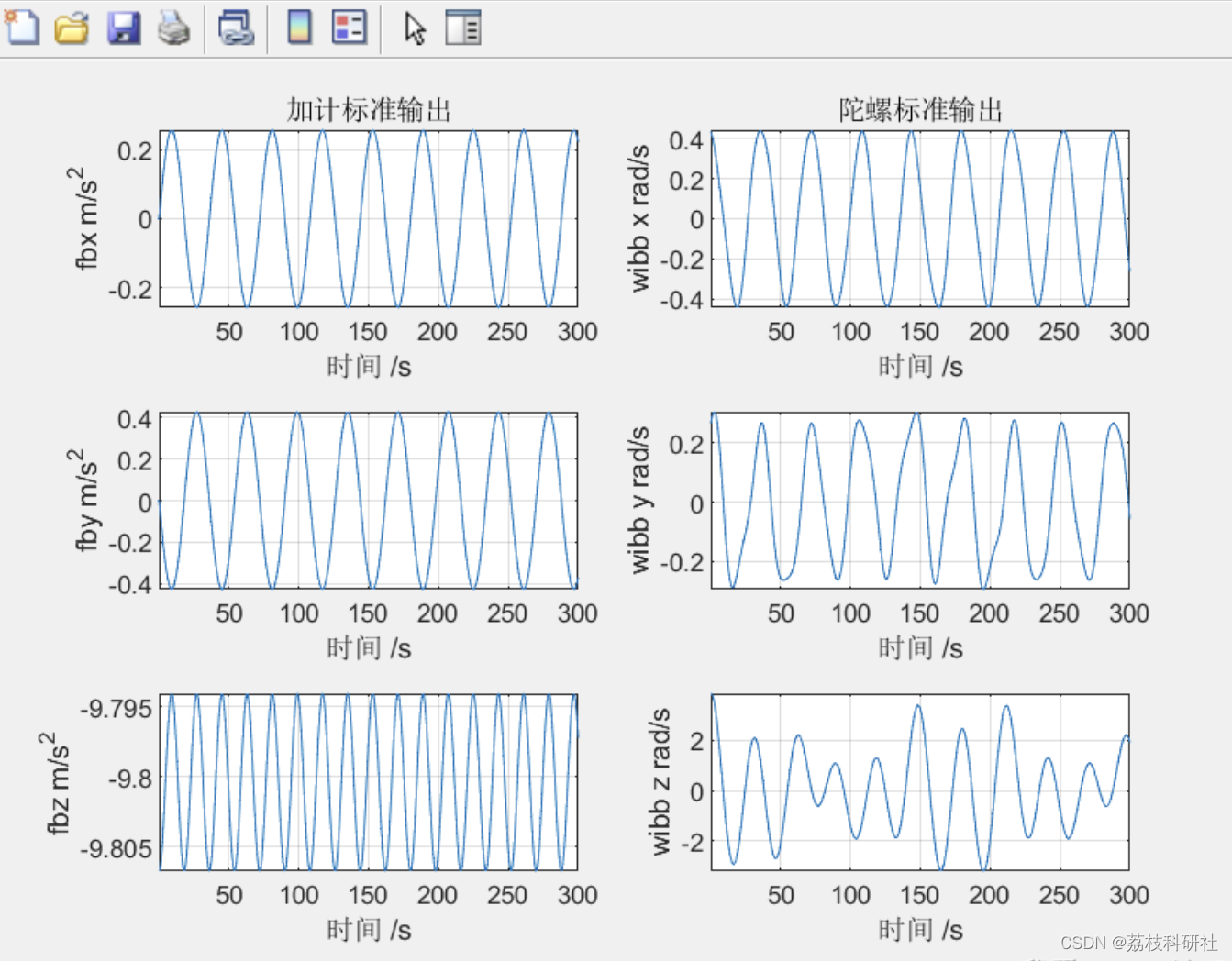
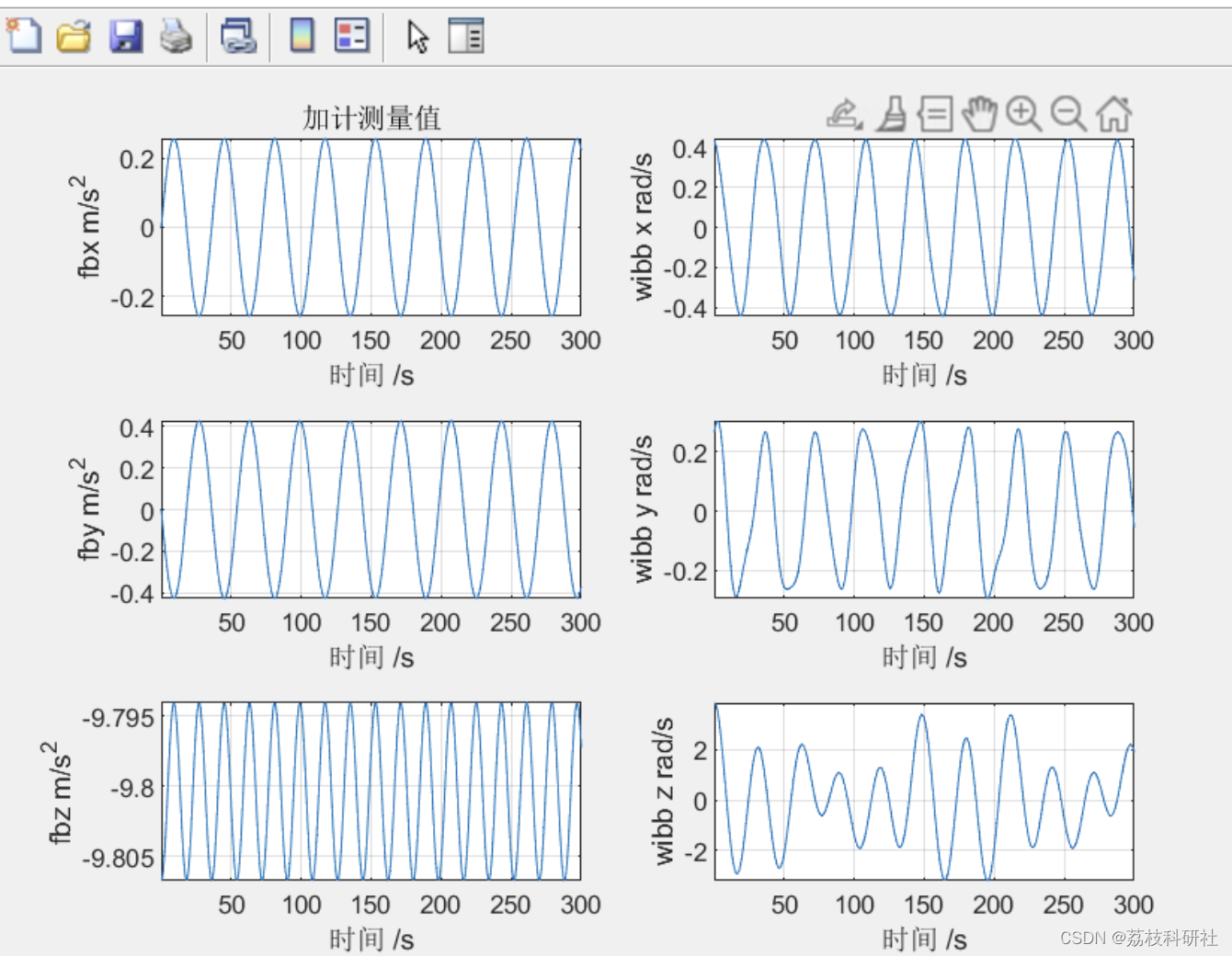
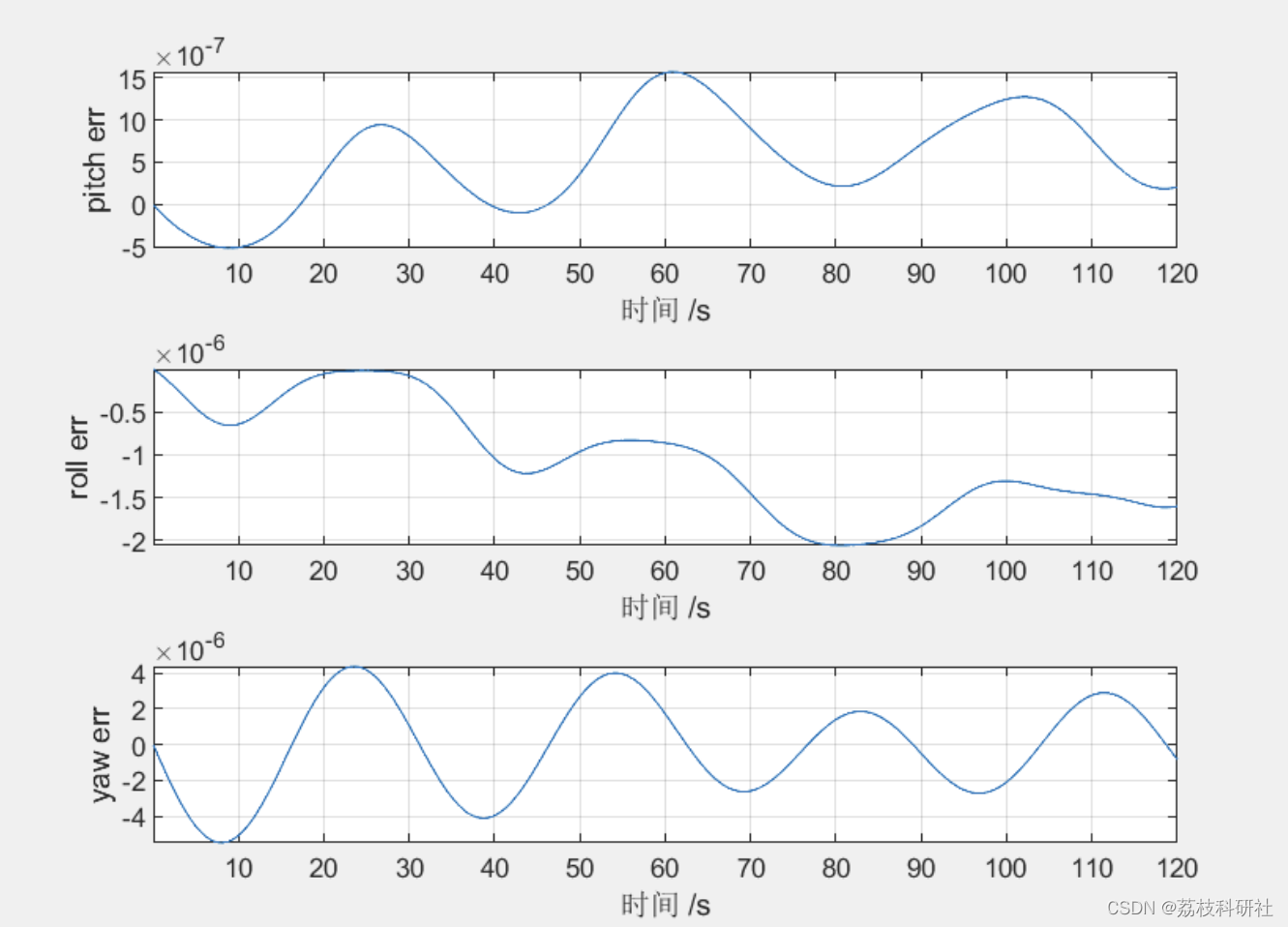
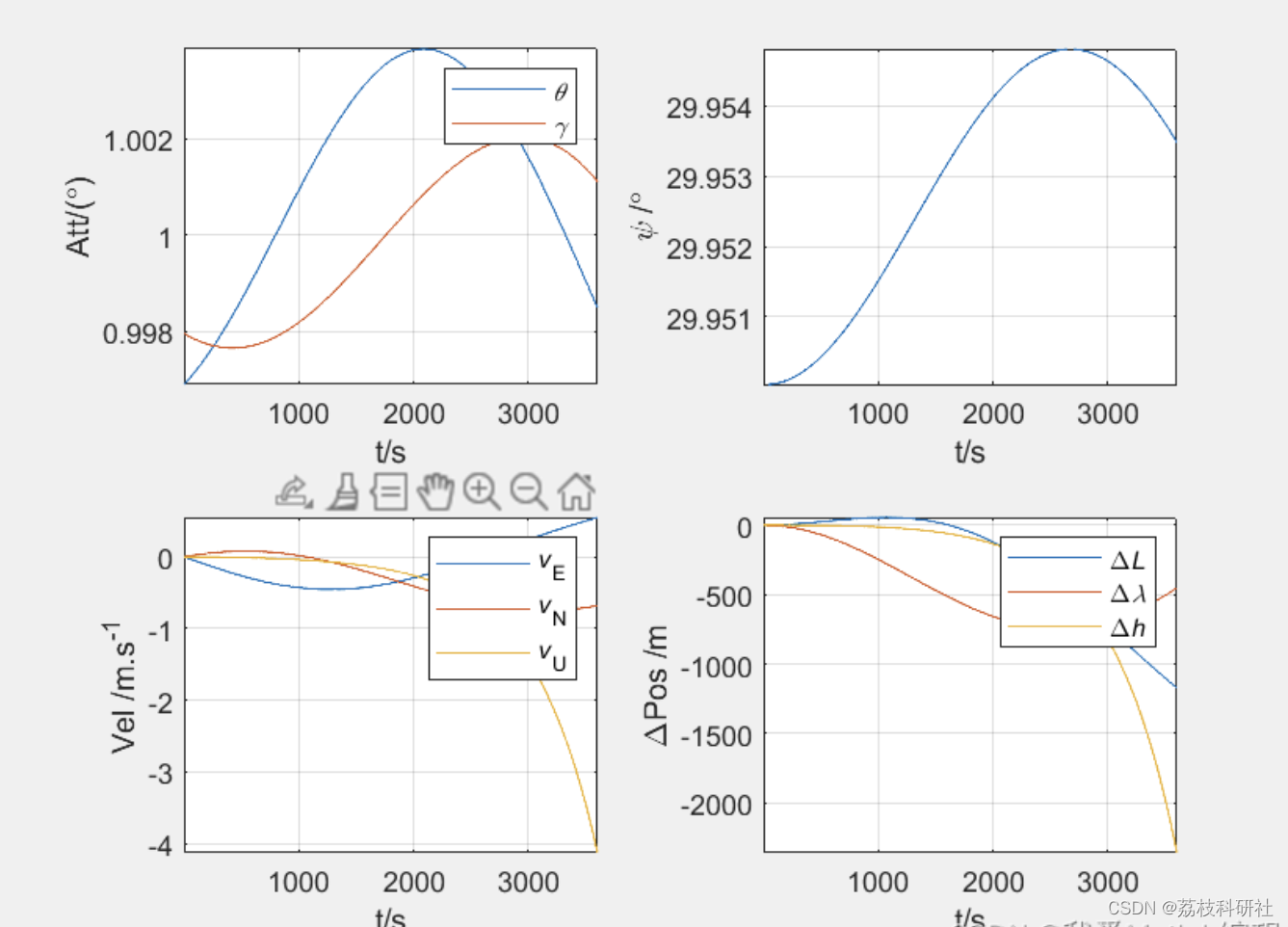
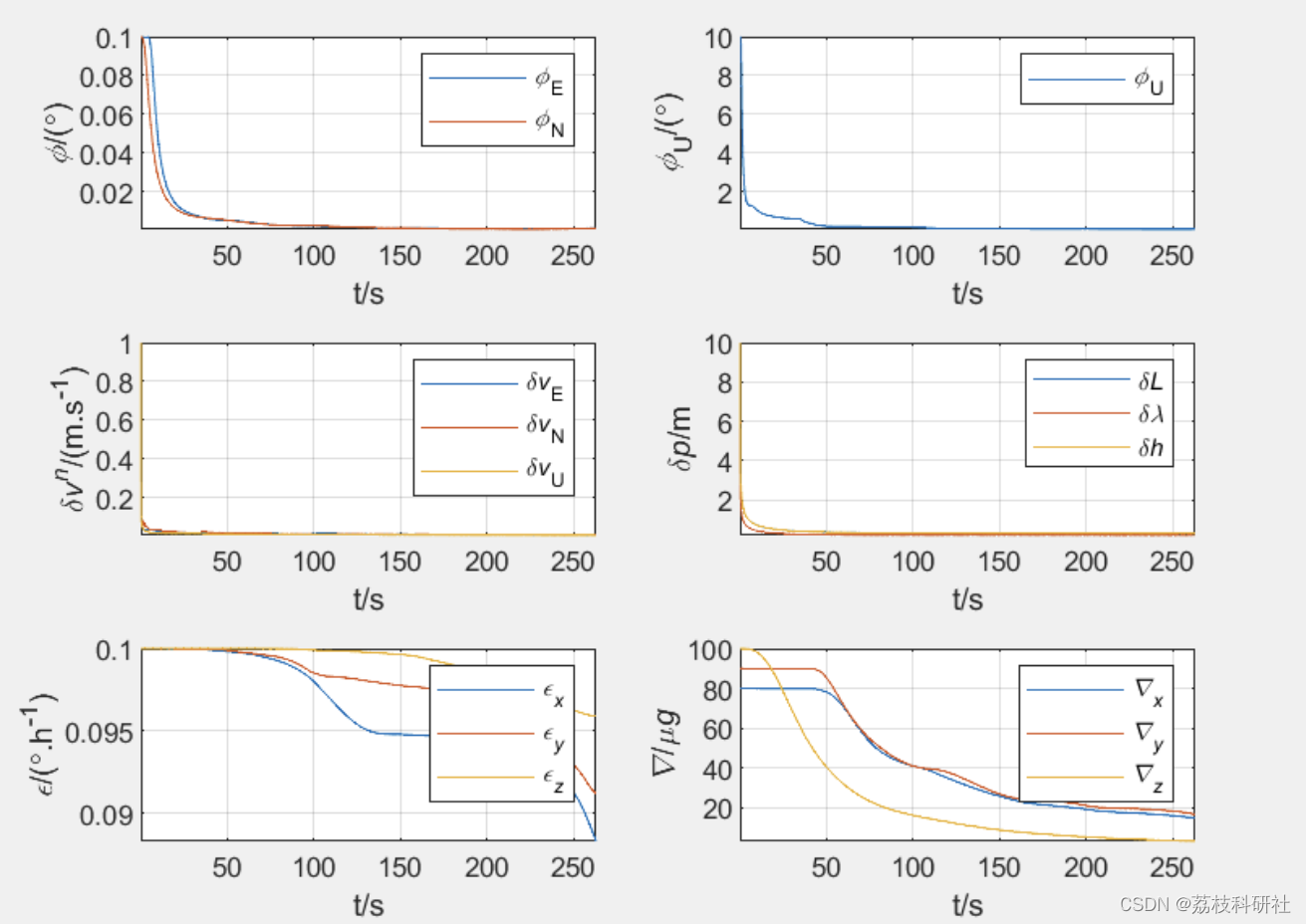
📚2 运行结果
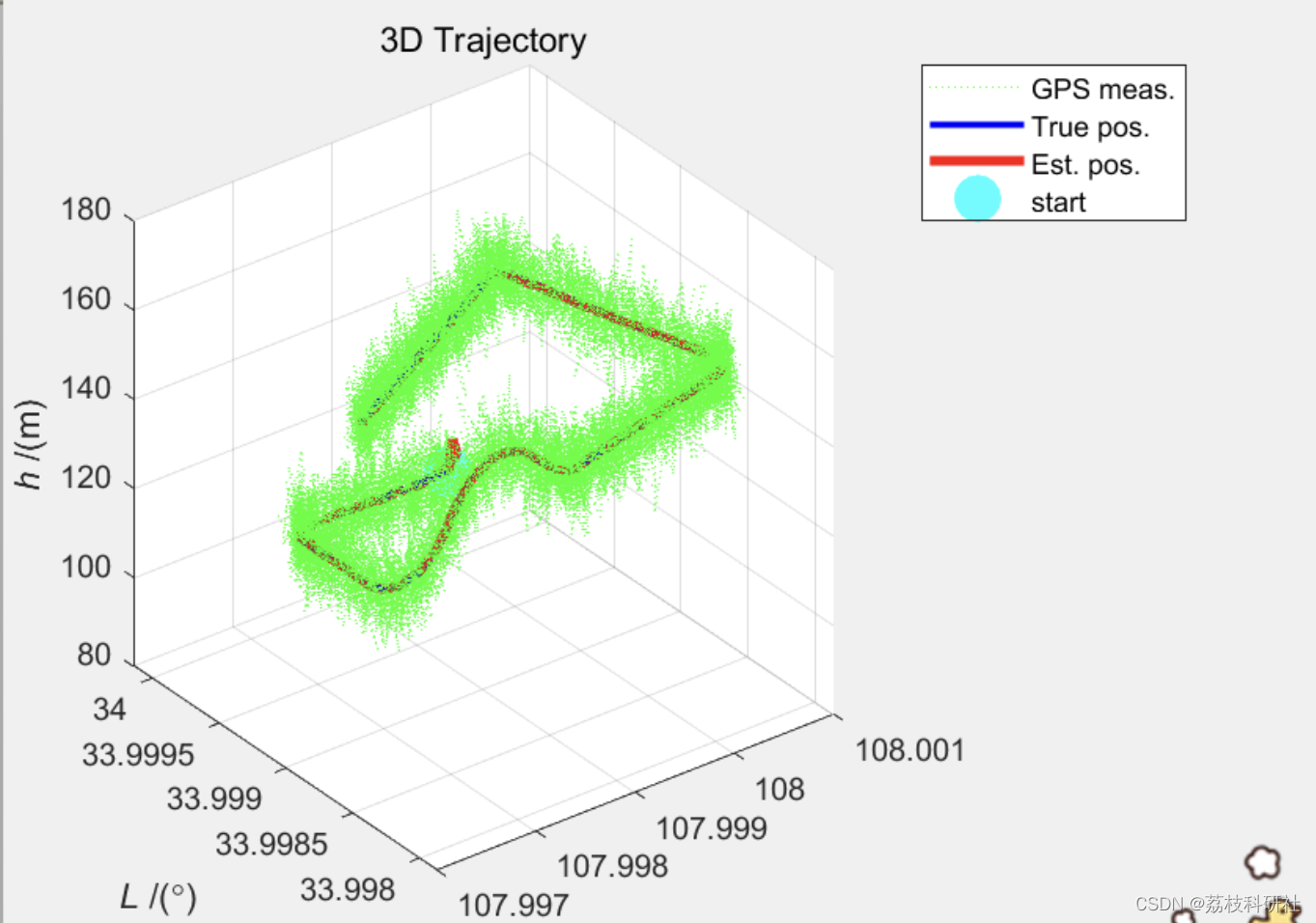
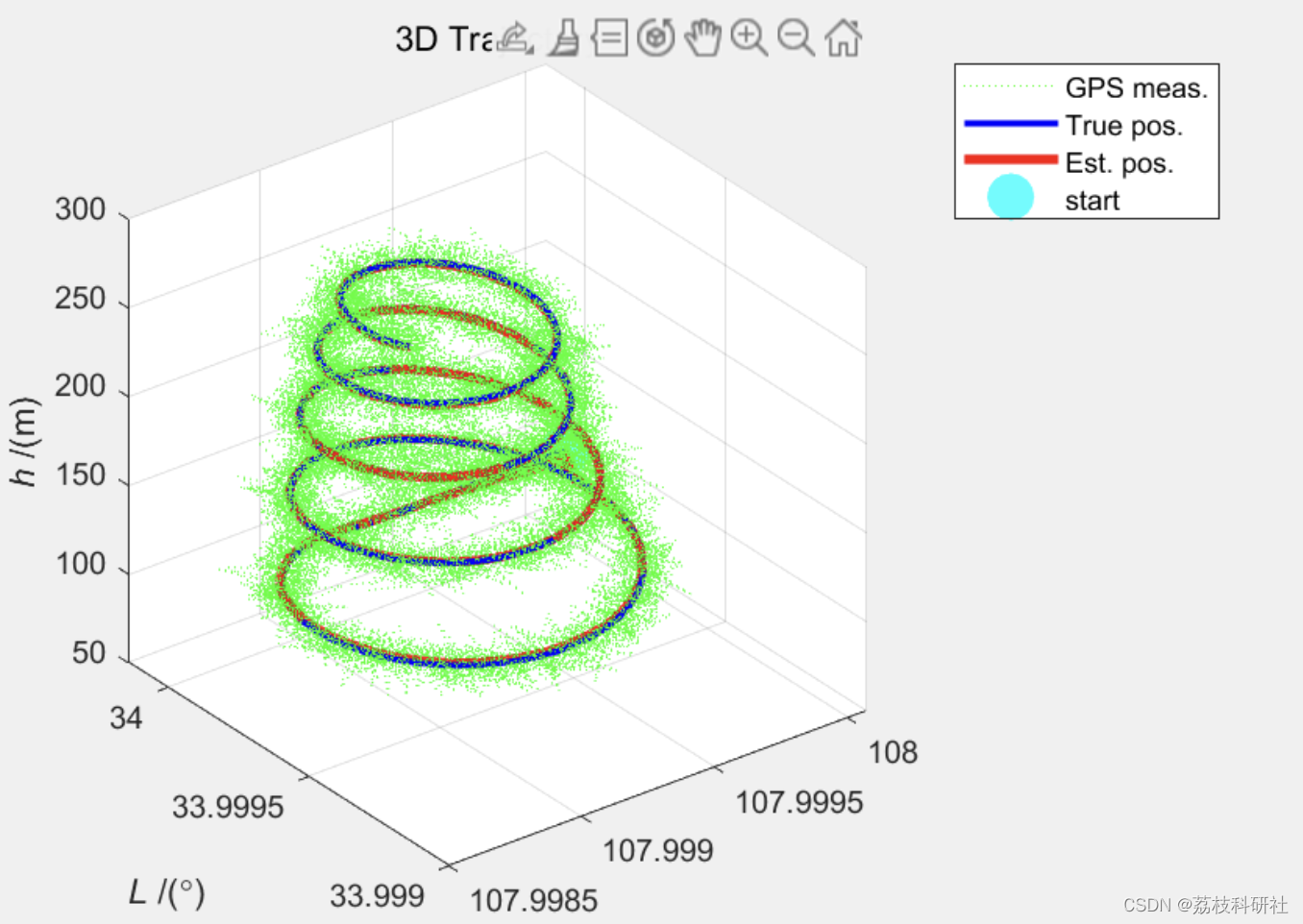

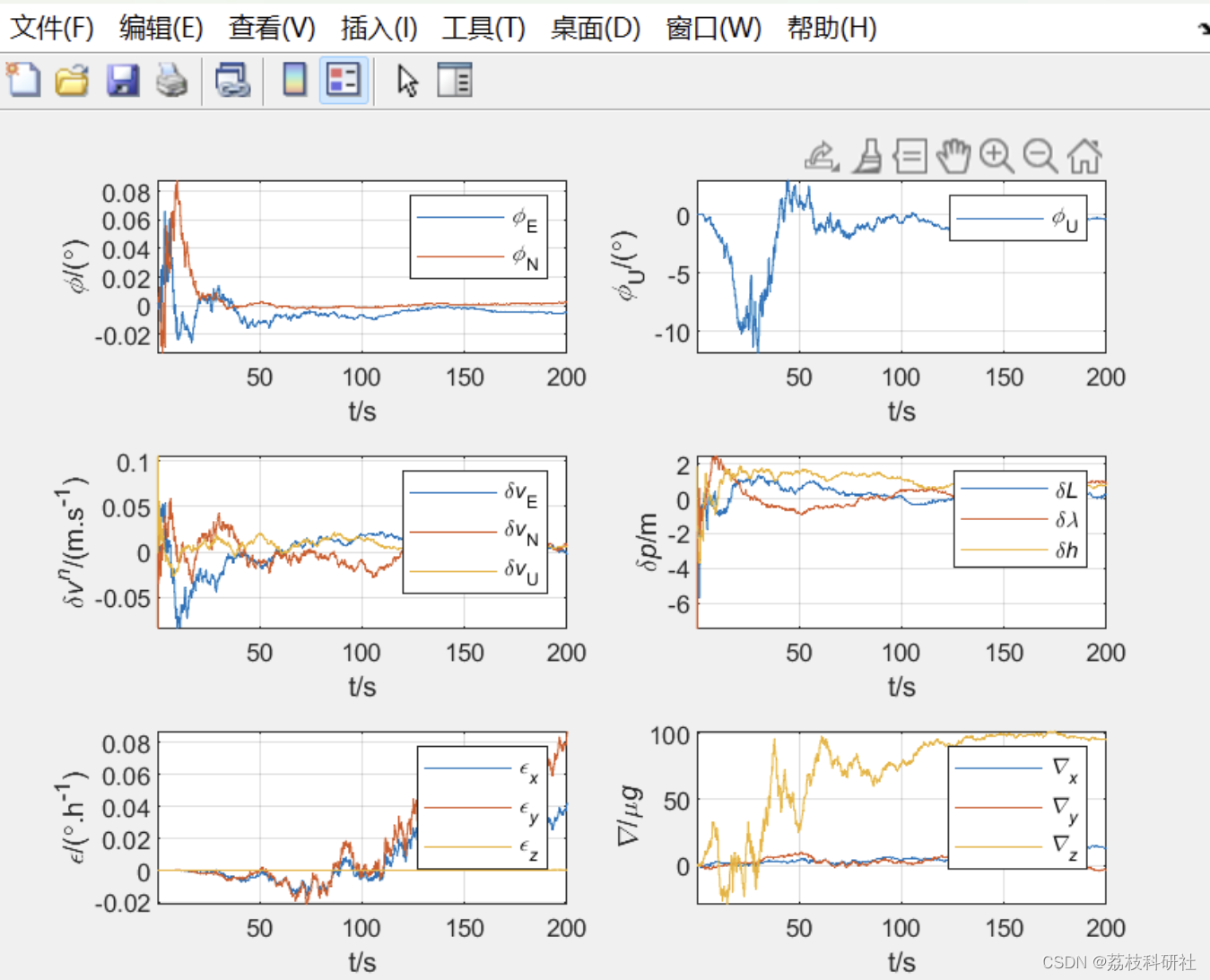
部分代码:
% load Uav true trajectory data.
addpath UavTrajectorySim;
disp(' ')
disp('Available UAV Truth Trajectory Data Files:')
dir_mat_files = dir('UavTrajectorySim\*.mat');
for nFile=1:length(dir_mat_files)
fprintf(' %d: %s\n',nFile,dir_mat_files(nFile).name);
end
% nFileChoice = input('Choose a UAV Truth data file (e.g. 1<Enter>): ');
try
% load(dir_mat_files(nFileChoice).name)
load(dir_mat_files(1).name)
catch
error('Selected UAV Truth Trajectory data file (%d) is invalid.\n',nFileChoice);
end
gvar_earth;
% 单次更新中使用的子样数
nn = 2;
% 采样时间
ts = 0.01;
nts = nn*ts;
% 初始姿态、速度、位置
att0 = [0, 0, 90]'*arcdeg;
vn0 = [0, 0, 0]';
pos0 = [34*arcdeg, 108*arcdeg, 100]'; % lattitude, longtitude, height
qbn0 = a2qua(att0);
% 姿态四元数、速度、位置
qbn = qbn0;
vn = vn0;
pos = pos0;
eth = earth(pos, vn);
% *** 添加误差 ***
% 失准角
phi = [0.1, 0.2, 1]'*arcmin;
qbn = qaddphi(qbn, phi);
% 陀螺零偏,角度随机游走
eb_ref = [0.1, 0.15, 0.2]'*dph;
eb = [0.01, 0.015, 0.02]'*dph;
web = [0.001, 0.001, 0.001]'*dpsh;
% 加计零偏,速度随机游走
db_ref = [800, 900, 1000]'*ug;
db = [80, 90, 100]'*ug;
wdb = [1, 1, 1]'*ugpsHz;
Qk = diag([web', wdb', zeros(1, 9)]')^2*nts;
rk = [[0.1, 0.1, 0.1], [5/Re, 5/Re, 5]]';
Rk = diag(rk)^2;
% 协方差矩阵,x = [phi, delta_vn, delta_p, eb, db]
P0 = diag([[0.1, 0.1, 10]*arcdeg, [1, 1, 1], [10/Re, 10/Re, 10]...
[0.1, 0.1, 0.1]*dph, [80, 90, 100]*ug]')^2;
% 量测矩阵
Hk = [zeros(6,3), eye(6), zeros(6, 6)];
% Kalman filter initialization
kf = kfinit(Qk, Rk, P0, zeros(15), Hk);
% 与模拟轨迹时长一致
kTime = fix(t_SD/ts);
err = zeros(kTime, 10);
xkpk = zeros(kTime, 2*kf.n + 1);
pos_ref = zeros(kTime,3);
pos_est = zeros(kTime,3);
pos_gps = zeros(kTime,3);
kk = 1;
t = 0;
for k = 2 : nn : kTime
t = t + nts;
% 获取模拟轨迹对应的imu输出: 角增量和速度增量(参考值)
wm(1:nn,:) = imu_SD.wm(k-nn+1:k,:);
vm(1:nn,:) = imu_SD.vm(k-nn+1:k,:);
% 为IMU参考输出添加噪声
[wm1, vm1] = imuadderr(wm, vm, eb, web, db, wdb, ts);
% 惯导更新:姿态四元数、速度、位置
[qbn, vn, pos, eth] = insupdate(qbn, vn, pos, wm1, vm1, ts);
% 基于模型预测:导航误差系统模型卡尔曼滤波
kf.Phikk_1 = eye(15) + kfft15(eth, q2mat(qbn), sum(vm1, 1)'/nts)*nts;
kf = kfupdate(kf);
% 模拟GPS量测数据
gps = [avp_SD.vn(k,:)'; avp_SD.pos(k,:)'] + rk.*randn(6, 1);
pos_gps(kk,:) = gps(4:6)';
% 量测更新 5Hz
if mod(t, 0.2) < nts
Zk = [vn', pos']' - gps;
kf = kfupdate(kf, Zk, 'M');
end
% Indirect Kalman filter:feedback to IMU (反馈校正法)
qbn = qdelphi(qbn, kf.Xk(1:3));
vn = vn - kf.Xk(4:6);
pos = pos - kf.Xk(7:9);
pos_est(kk,:) = pos';
% 反馈校正:由于反馈项的存在导致卡尔曼滤波的先验估计值始终为零. Ref: 王辰熙
kf.Xk(1:3) = 0;
kf.Xk(4:6) = 0;
kf.Xk(7:9) = 0;
% kf.Xk(10:12) = 0;
% kf.Xk(13:15) = 0;
% compute the error between estimation & truth data
% Note that this 'error' is not the 'state vector' in the Kalman equ.
% In indirect kalman filter, the 'state vector' means the error of
% the IMU update (respect to True data.)
qbn_ref = a2qua(avp_SD.att(k,:));
vn_ref = avp_SD.vn(k,:)';
pos_ref(kk,:) = avp_SD.pos(k,:);
err(kk, :) = [qq2phi(qbn, qbn_ref)', (vn - vn_ref)', (pos - pos_ref(kk,:)')', t];
xkpk(kk, :) = [kf.Xk', diag(kf.Pk)', t]';
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]刘洪剑,王耀南,谭建豪,李树帅,钟杭.一种旋翼无人机组合导航系统设计及应用[J].传感技术学报,2017,30(02):331-336.
🌈4 Matlab代码实现
相关文章
C语言中strstr函数的使用!


C# 常用排序算法(冒泡排序 插入排序 选择排序 快速排序 归并排序 堆排序)

二维平面阵列波束赋形原理和Matlab仿真
为什么Java中的String类被设计为final类?

大数据深度学习卷积神经网络CNN:CNN结构、训练与优化一文全解

C++归并排序详解以及代码实现
高并发场景下如何实现系统限流?


【WSN】基于蚁群算法的WSN路由协议(最短路径)消耗节点能量研究(Matlab代码实现)
图像的视网膜变换研究(Matlab代码实现)
【具有路由 WSN 模拟器的随机方式移动】具有路由 WSN 模拟器的随机方式移动(Matlab代码实现)

【图像误差测量】测量 2 张图像之间的差异,并测量图像质量(Matlab代码实现)
毫米波V2I网络的链路层仿真研究(Matlab代码实现)
【图像分割】图像检测(分割、特征提取)、各种特征(面积等)的测量和过滤(Matlab代码实现)
【红外图像增强】基于引力和侧向抑制网络的红外图像增强模型(Matlab代码实现)
【红外与可见光图像融合】离散平稳小波变换域中基于离散余弦变换和局部空间频率的红外与视觉图像融合方法(Matlab代码实现)
使用显著性检测的可见光和红外图像的两尺度图像融合(Matlab代码实现)

【图像处理】使用各向异性滤波器和分割图像处理从MRI图像检测脑肿瘤(Matlab代码实现)

【交互式阈值二进制图像】采用彩色或单色图像通过交互/手动方式阈值单色图像或彩色图像的单个色带研究(Matlab代码实现)

面向无线传感器网络WSN的增强型MODLEACH设计与仿真(Matlab代码实现)
【 2023华为杯C题】大规模创新类竞赛评审方案研究(思路、代码......)