💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
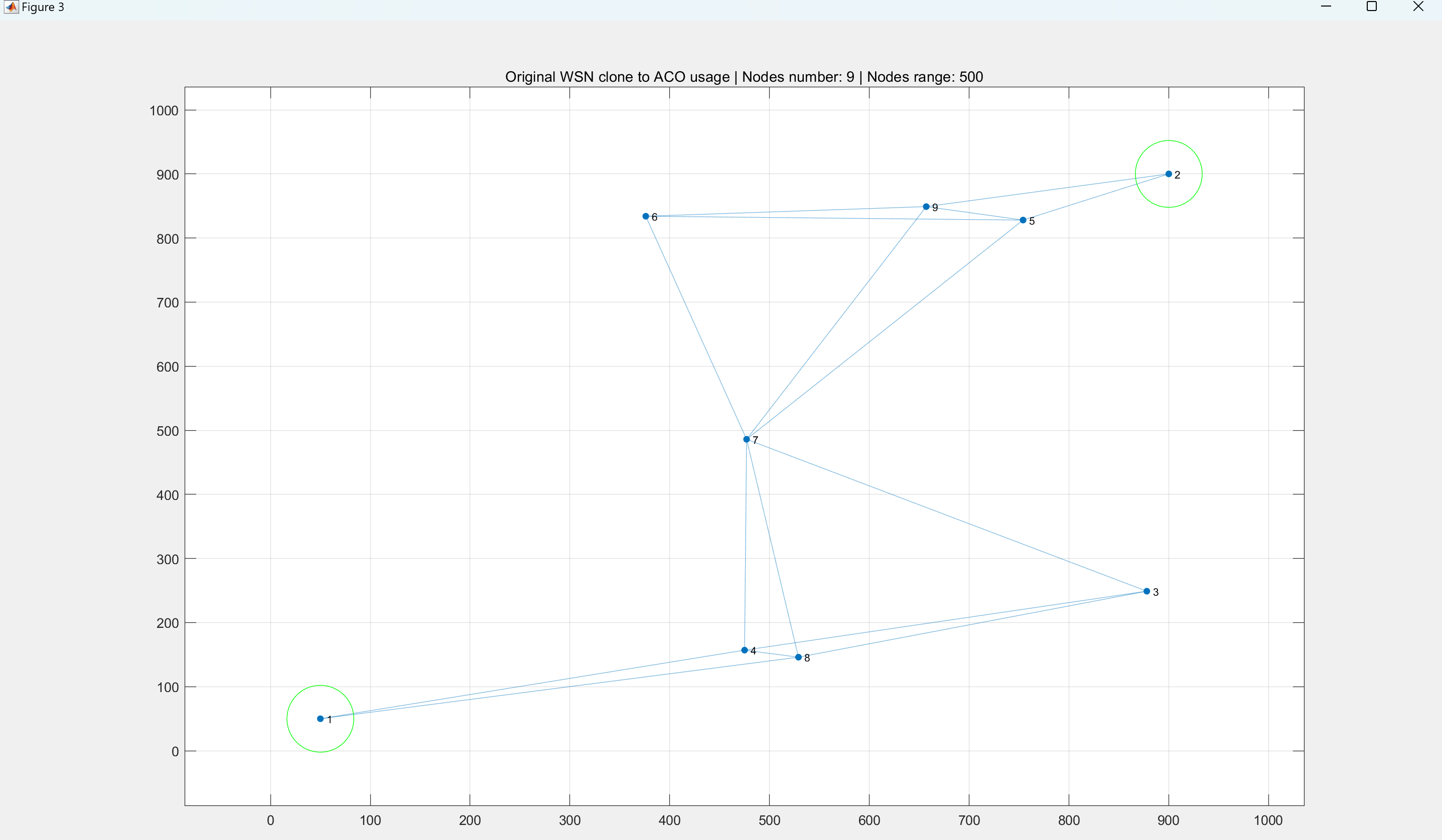
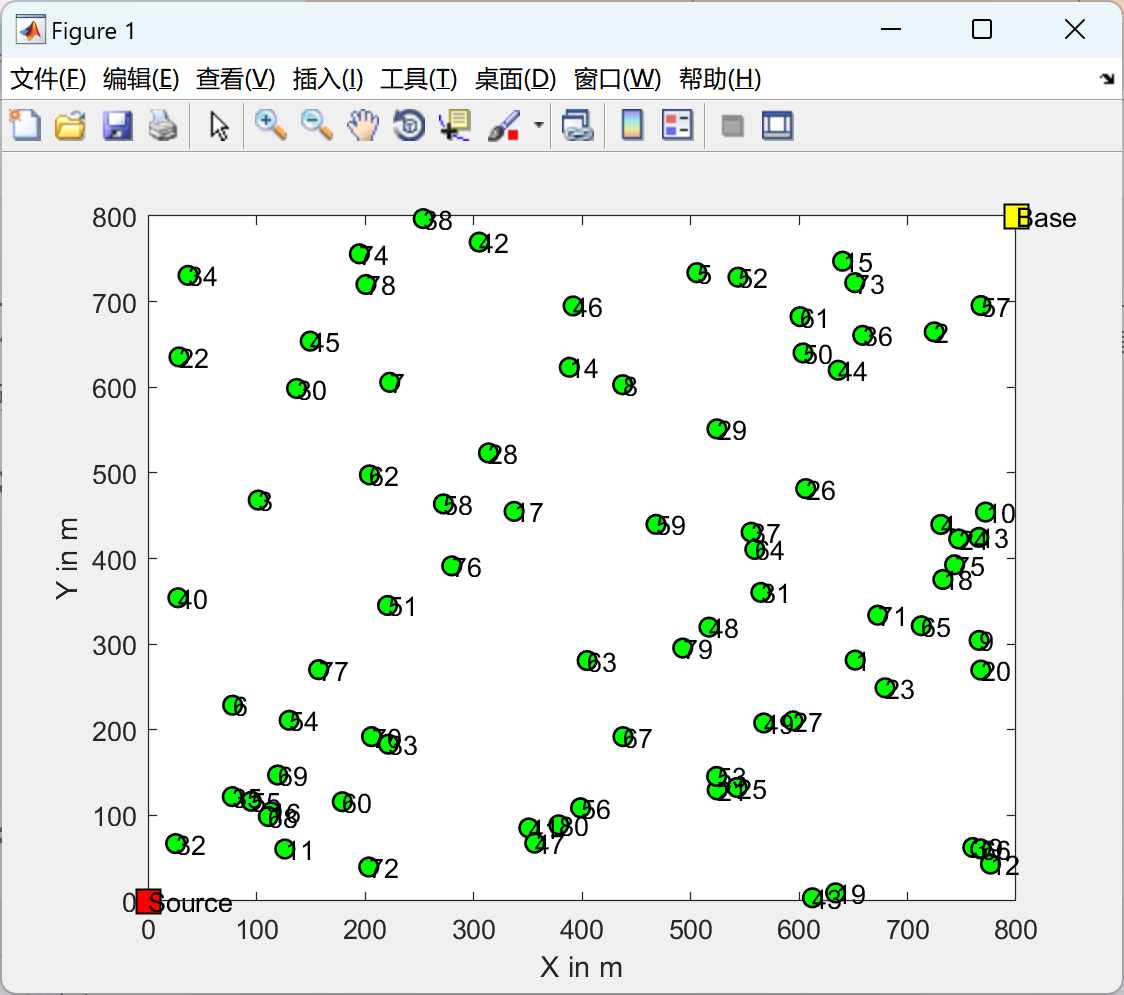
【WSN】基于蚁群算法的路由协议(最短路径)对节点能量的消耗研究是一个十分重要的课题。
在无蚁群算法(ACO)的情况下的无线传感器网络(WSN)中,当使用相同的路由协议(最短路径)时,节点能量会不断消耗,最终导致节点死亡。这是因为传感器节点在进行数据传输时,往往需要通过多个中继节点才能到达目的地,这些中继节点的数据转发会消耗大量的能量。而在没有ACO算法的情况下,网络中的节点并没有考虑到能量消耗的差异,因此无法做出针对性的路由选择。
而在应用了ACO步骤的WSN网络中,情况就不同了。同样是通过路由协议(最短路径)进行数据传输,但ACO分析了正在使用的路径的能量消耗情况,并根据能量消耗的评估结果来进行路由调整。这意味着在ACO算法的指导下,节点能够根据路由路径上的能量变化情况做出相应的决策。比如,如果某个路径的能量消耗较大,ACO可以选择其他能量消耗相对较小的路径,以减少节点的能量消耗。
通过引入ACO算法,WSN网络中的节点能够更加智能地选择路由路径,从而减少节点能量的消耗。这将延长整个网络的寿命,并提高网络的稳定性和性能。此外,ACO算法也可以根据网络的实际情况进行调整和优化,以更好地适应不同的应用场景和节点能量消耗的变化。
总而言之,通过研究基于蚁群算法的路由协议(最短路径)对节点能量的消耗,我们可以深入理解WSN网络中能量问题的关键因素,并为解决节点能量消耗过高的问题提供有效的方法。引入ACO算法可以使节点能够根据能量消耗情况智能地选择路由路径,从而优化能量分配,延长网络寿命,并提高网络的可靠性和性能。
📚2 运行结果

 持续运行中。
持续运行中。


部分代码:
%% Main configuration values for this simulation
dataset.nodeNo = 9; %Number of nodes
ACOnodeNo = dataset.nodeNo;
dataset.nodePosition(1,:) = [1 50 50]; %(Sender node fixed position)
dataset.nodePosition(2,:) = [2 900 900]; %(Receiver node fixed position)
dataset.NeighborsNo = 5;
dataset.range = 500; %Tolerance distance to became neighbor of one node (Euclidean distance based)
dataset.atenuationFactor = 1.8; %Atenuation factor in freespace - ranges from 1.8 to 4 due environment
dataset.minEnergy = 80; % Mw - Miliwatts (70% energy)
dataset.maxEnergy = 100; % Mw - Miliwatts (Full energy (100%) - 1 mAh charge capacity within 1 Volt energy)
dataset.energyconsumptionperCicle = 0.85;
dataset.energyrecoveryperCicle = 0.2;
dataset.minenergyfactor = 0.18;
dataset.maxenergyfactor = 0.2;
STenergy=inf;
packet=0;
iterationcounter=1;
plotgraphs=1; %Choose 1 for "yes" or 0 for "no" if you want to plot graphs or no (Better performance if no)
reprodutibily = 0; %1 = yes (always generate same random numbers) (0) for no reprodutibility (Different random numbers every code execution);
% Node position sortition
if reprodutibily == 0
rng('shuffle');
else
rng('default');
end
for a = 3 : dataset.nodeNo
dataset.nodeId = a;
garbage.x = randi([1 900]); %Xpos sortition
garbage.y = randi([1 900]); %Ypos sortition
dataset.nodePosition(a,:) = [dataset.nodeId garbage.x garbage.y]; %NodeID, X and Y position into nodePosition table
end
% Euclidean Distance calc from one node to all others
for i = 1 : dataset.nodeNo
for j = 1: dataset.nodeNo
garbage.x1 = dataset.nodePosition(i,2);
garbage.x2 = dataset.nodePosition(j,2);
garbage.y1 = dataset.nodePosition(i,3);
garbage.y2 = dataset.nodePosition(j,3);
dataset.euclidiana(i,j) = sqrt( (garbage.x1 - garbage.x2) ^2 + (garbage.y1 - garbage.y2)^2 );
end
end
% Edges matrix definition due "range" variable value
dataset.weights = lt(dataset.euclidiana,dataset.range);
% Graph construction
G=graph(dataset.weights,'omitselfloops'); %Graph creation based on adjacency matrix (Edges matrix) built above
% Euclidean distance extraction for all existente end-to-end formed by
% "distance tolerance" (range variable value)%% Main configuration values for this simulation
dataset.nodeNo = 9; %Number of nodes
ACOnodeNo = dataset.nodeNo;
dataset.nodePosition(1,:) = [1 50 50]; %(Sender node fixed position)
dataset.nodePosition(2,:) = [2 900 900]; %(Receiver node fixed position)
dataset.NeighborsNo = 5;
dataset.range = 500; %Tolerance distance to became neighbor of one node (Euclidean distance based)
dataset.atenuationFactor = 1.8; %Atenuation factor in freespace - ranges from 1.8 to 4 due environment
dataset.minEnergy = 80; % Mw - Miliwatts (70% energy)
dataset.maxEnergy = 100; % Mw - Miliwatts (Full energy (100%) - 1 mAh charge capacity within 1 Volt energy)
dataset.energyconsumptionperCicle = 0.85;
dataset.energyrecoveryperCicle = 0.2;
dataset.minenergyfactor = 0.18;
dataset.maxenergyfactor = 0.2;
STenergy=inf;
packet=0;
iterationcounter=1;
plotgraphs=1; %Choose 1 for "yes" or 0 for "no" if you want to plot graphs or no (Better performance if no)
reprodutibily = 0; %1 = yes (always generate same random numbers) (0) for no reprodutibility (Different random numbers every code execution);
% Node position sortition
if reprodutibily == 0
rng('shuffle');
else
rng('default');
end
for a = 3 : dataset.nodeNo
dataset.nodeId = a;
garbage.x = randi([1 900]); %Xpos sortition
garbage.y = randi([1 900]); %Ypos sortition
dataset.nodePosition(a,:) = [dataset.nodeId garbage.x garbage.y]; %NodeID, X and Y position into nodePosition table
end
% Euclidean Distance calc from one node to all others
for i = 1 : dataset.nodeNo
for j = 1: dataset.nodeNo
garbage.x1 = dataset.nodePosition(i,2);
garbage.x2 = dataset.nodePosition(j,2);
garbage.y1 = dataset.nodePosition(i,3);
garbage.y2 = dataset.nodePosition(j,3);
dataset.euclidiana(i,j) = sqrt( (garbage.x1 - garbage.x2) ^2 + (garbage.y1 - garbage.y2)^2 );
end
end
% Edges matrix definition due "range" variable value
dataset.weights = lt(dataset.euclidiana,dataset.range);
% Graph construction
G=graph(dataset.weights,'omitselfloops'); %Graph creation based on adjacency matrix (Edges matrix) built above
% Euclidean distance extraction for all existente end-to-end formed by
% "distance tolerance" (range variable value)
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]廖明华,张华,谢建全.基于蚁群算法的WSN能量预测路由协议[J].计算机工程, 2012, 38(3):88-90.DOI:10.3969/j.issn.1000-3428.2012.03.030.
[1]米奕萍.基于改进型蚁群算法的WSN路由算法的研究[D].中北大学[2023-09-19].DOI:CNKI:CDMD:2.1012.336755.
🌈4 Matlab代码实现
相关文章
C语言中strstr函数的使用!


C# 常用排序算法(冒泡排序 插入排序 选择排序 快速排序 归并排序 堆排序)

二维平面阵列波束赋形原理和Matlab仿真
为什么Java中的String类被设计为final类?

大数据深度学习卷积神经网络CNN:CNN结构、训练与优化一文全解

C++归并排序详解以及代码实现
高并发场景下如何实现系统限流?


【Java 基础篇】Java网络编程实时数据流处理

【Java 基础篇】Java Lambda表达式详解

【Java 基础篇】Java Consumer 接口详解
多旋翼无人机组合导航系统-多源信息融合算法(Matlab代码实现)
图像的视网膜变换研究(Matlab代码实现)
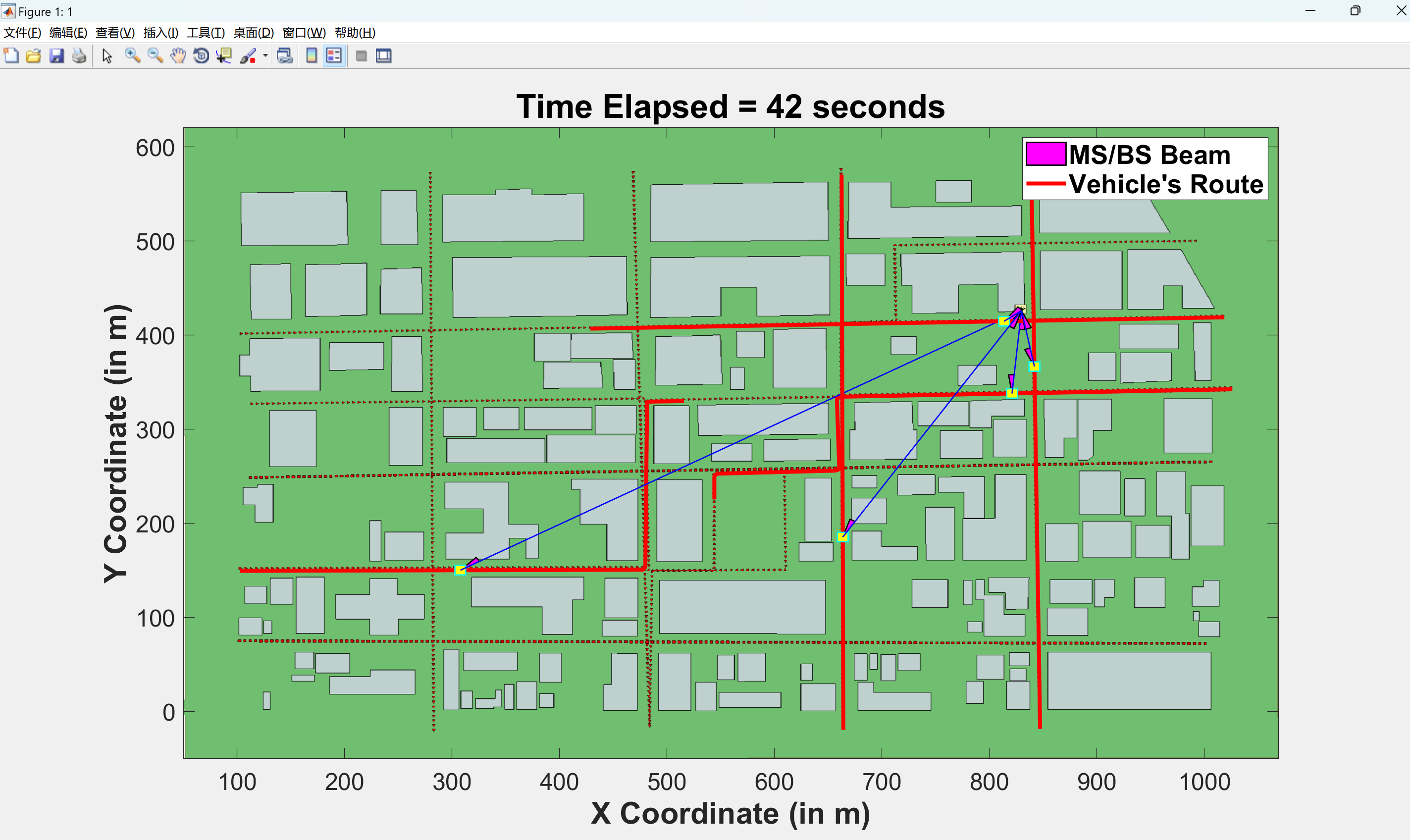
【具有路由 WSN 模拟器的随机方式移动】具有路由 WSN 模拟器的随机方式移动(Matlab代码实现)

【图像误差测量】测量 2 张图像之间的差异,并测量图像质量(Matlab代码实现)
毫米波V2I网络的链路层仿真研究(Matlab代码实现)
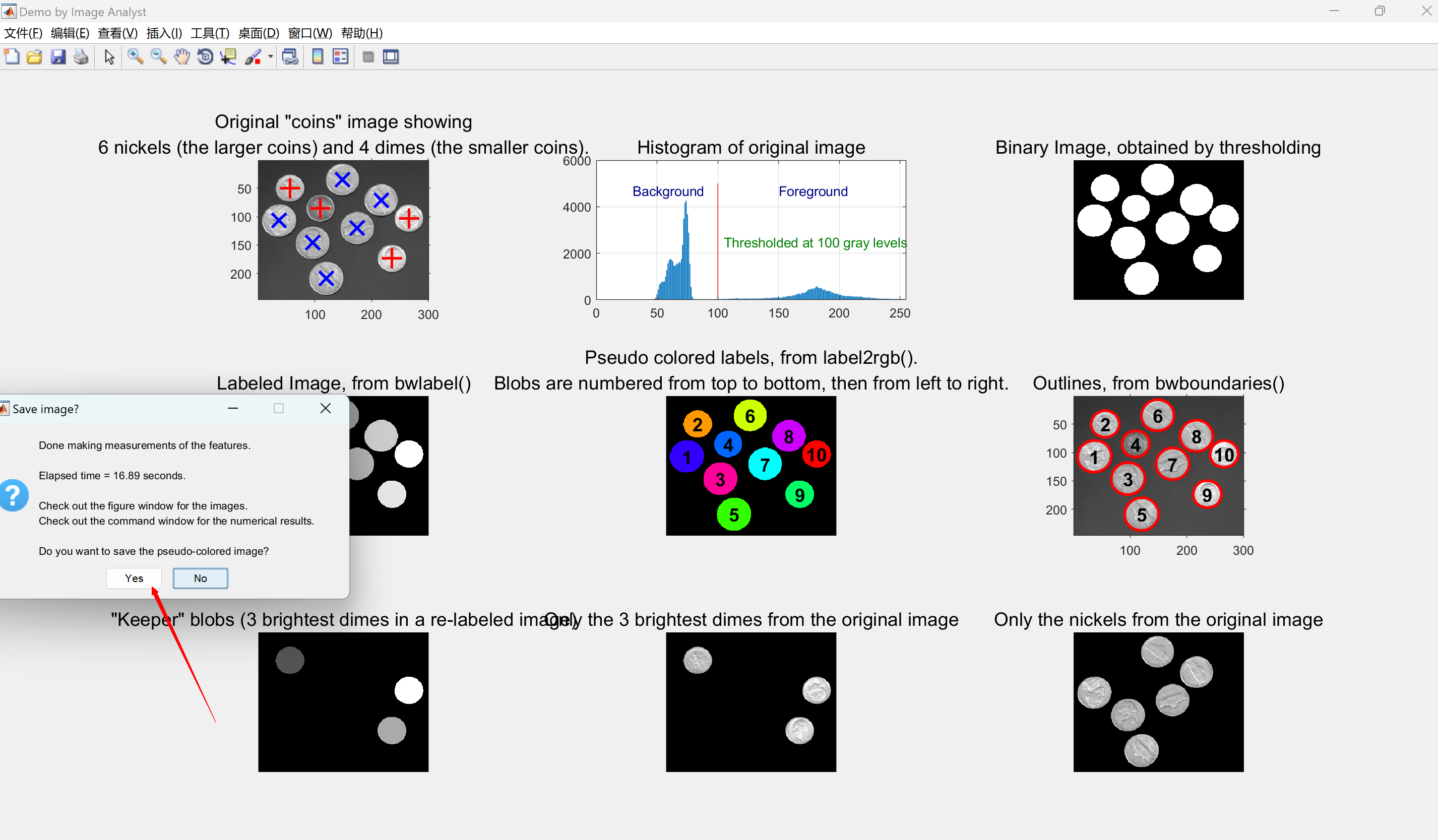
【图像分割】图像检测(分割、特征提取)、各种特征(面积等)的测量和过滤(Matlab代码实现)
【红外图像增强】基于引力和侧向抑制网络的红外图像增强模型(Matlab代码实现)
【红外与可见光图像融合】离散平稳小波变换域中基于离散余弦变换和局部空间频率的红外与视觉图像融合方法(Matlab代码实现)
使用显著性检测的可见光和红外图像的两尺度图像融合(Matlab代码实现)

【图像处理】使用各向异性滤波器和分割图像处理从MRI图像检测脑肿瘤(Matlab代码实现)

【交互式阈值二进制图像】采用彩色或单色图像通过交互/手动方式阈值单色图像或彩色图像的单个色带研究(Matlab代码实现)

面向无线传感器网络WSN的增强型MODLEACH设计与仿真(Matlab代码实现)
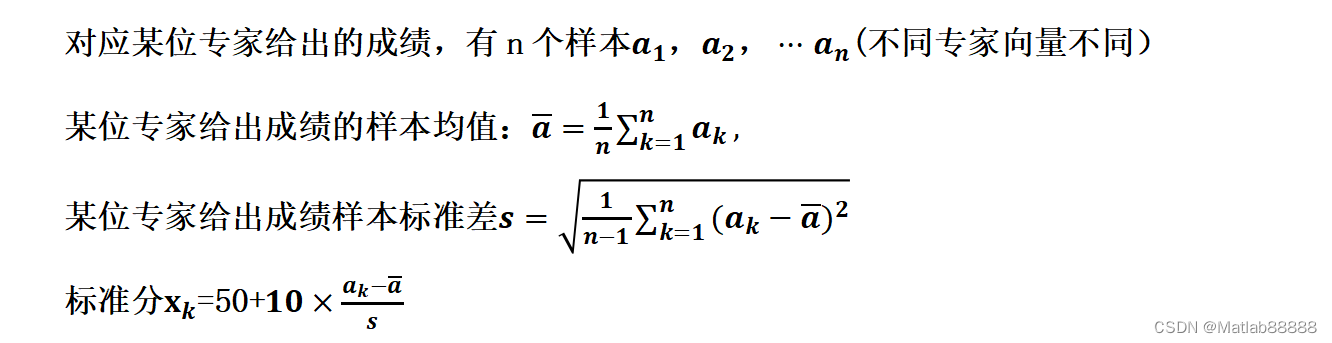
【 2023华为杯C题】大规模创新类竞赛评审方案研究(思路、代码......)